工業機器人的工作原理是一個比較復雜的問題。簡單地說,它的原理就是模仿人的各種肢體動作、思考方式和控制決策能力。從控制的角度,機器人可以通過如下四種方式來達到這一目標。
“示教再現”方式:它通過“示教盒”或人“手把手”兩種方式教機械手如何動作,controller將示教過程記憶下來,然后機器人就按照記憶周而復始地重復示教動作,如噴涂機器人。
“可編程控制”方式:工作人員事先根據機器人的工作任務和運動軌跡編制控制程序,然后將控制程序輸入給機器人的controller,起動控制程序,機器人就按照程序所規定的動作一步一步地去完成,如果任務變更,只要修改或重新編寫控制程序,靈活方便。大多數工業機器人都是按照前兩種方式工作的。 “
遙控”方式:由人用有線或無線remote control控制機器人在人難以到達或危險的場所完成某項任務。如防暴排險機器人、機器人、在有核輻射和化學污染環境工作的機器人等。
“自主控制”方式:是機器人控制中高度、復雜的控制方式,它要求機器人在復雜的非結構化環境中具有識別環境和自主決策能力,也就是要具有人的某些智能行為。
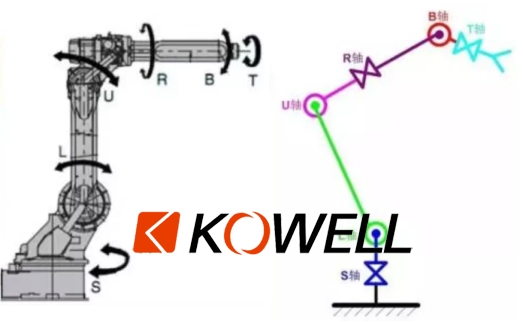
以六軸垂直多關節機器人為例(如下圖),通過科為機器人controller及其控制系統,可實現S軸回旋,L軸下臂傾動,U軸上臂傾動,R軸手臂橫擺,B軸手腕俯仰以及T軸的手腕回旋,實現六個軸的動作操作與配合。
|





